SiC TDI 线扫相机多维成像性能物理选型工作站
Professional Horizon V3.20 (更新于:2026-05-27 23:48)
1. 导入各分类对比图像
支持多选同时拖入。每台相机配暗场图、无缺陷正常区、含缺陷图和重复性图像。多张重复性图会自动拟合计算帧率稳定性 CV。 💡 macOS 提示:使用『📁 选文件夹』在系统弹窗中单击选中文件夹(或双击进入了该文件夹,即使子文件显示灰色)直接点击右下角「上传 / 选择」按钮即可成功导入!您也可以直接将该文件夹拖入下方对应的虚线框内完成秒级导入。
将整套数据文件夹拖拽至此处一键极速导入
支持自动解构多层级子目录,智能根据文件名与路径自动分类 Camera A/B 及其暗场、平场(FFC后)、无缺陷(FFC前)、有缺陷图
2. 缺陷与背景 ROI 交互标定框
填入缺陷 ROI 和背景 ROI 的绝对坐标,可在下方的 Canvas 画布上覆盖预览,并计算用于横向比较的 ROI CNR 值。
缺陷区域 (Defect ROI: x, y, w, h)
背景区域 (Background ROI: x, y, w, h)
🎨 图像平场校正前/后对比与标定框预览
📷 FFC 前 (原始图像)
✨ FFC 后 (平场校正后) 未激活
3. 商业选型推荐与核心诊断结论
🎯 相机成像物理评估要点
4. 相机稳定性、噪底及缺陷检出 CNR 对比图表
📈 重复性亮度稳定性 (Frame stability Jitter)
多张连续采图的 Mean 响应灰度曲线。展示相机在运行过程中的亮度波动和发热漂移。
📊 缺陷图像对比度与 CNR (Defect Contrast Index)
基于自动百分位分布及手动 ROI 定义。CNR 越高,缺陷相对背景越容易分离;最终识别率仍取决于算法阈值、样本分布和缺陷形态。
🔊 暗噪声与无明显缺陷区 SNR 分布
暗场 Std 越低,图像域暗场空间起伏越小;无缺陷正常区 SNR 需在同增益、同亮度或已归一化后才适合横向比较。
5. 双相机完整量化成像测试报告表
6. 物理量化指标原理说明与选型边界
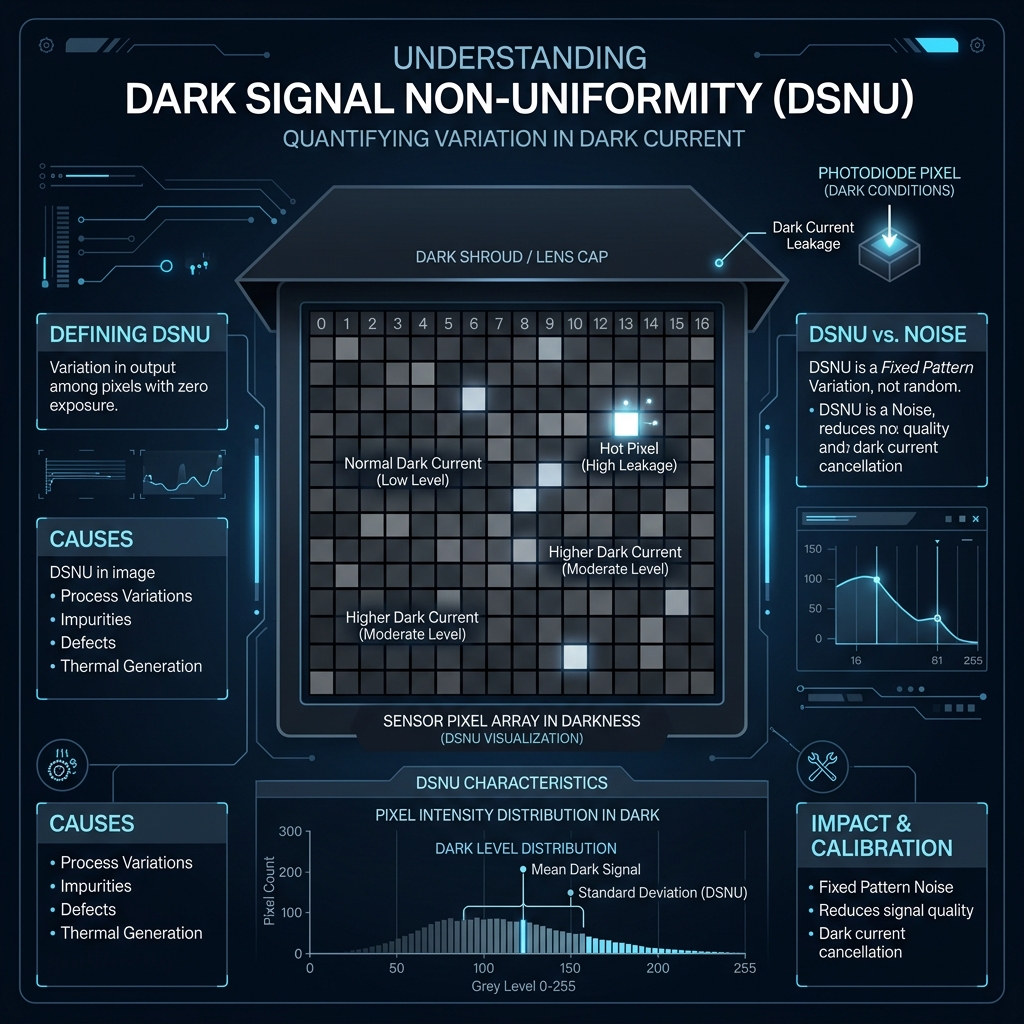
DSNU (Dark Signal Non-Uniformity) 暗场响应不均匀性 暗场空间起伏
DSNU ≈ σ_spatial_dark
Pixel_DSNU(x,y) = Pixel_dark(x,y) - Mean_dark
Pixel_DSNU(x,y) = Pixel_dark(x,y) - Mean_dark
物理含义:
在遮光、固定曝光和固定温度条件下,暗场图像的空间标准差可近似表征像素偏置、暗电流差异和读出链路残余固定模式噪声。
在遮光、固定曝光和固定温度条件下,暗场图像的空间标准差可近似表征像素偏置、暗电流差异和读出链路残余固定模式噪声。
- 边界条件: 本页面使用图像域 DN 直接估算,未做温度、曝光时间、增益和电子数换算,因此不等同于完整 EMVA 1288 的传感器级 DSNU。
- 校正影响: 暗场扣除可显著压低固定偏置,但热噪声、读噪、曝光漂移和校正残差不会被“完美消除”。
- 选型指导: 在相同采集条件下,暗场 Std 更低通常意味着暗区背景更干净,但还应结合坏点率、温漂和实际缺陷召回测试。
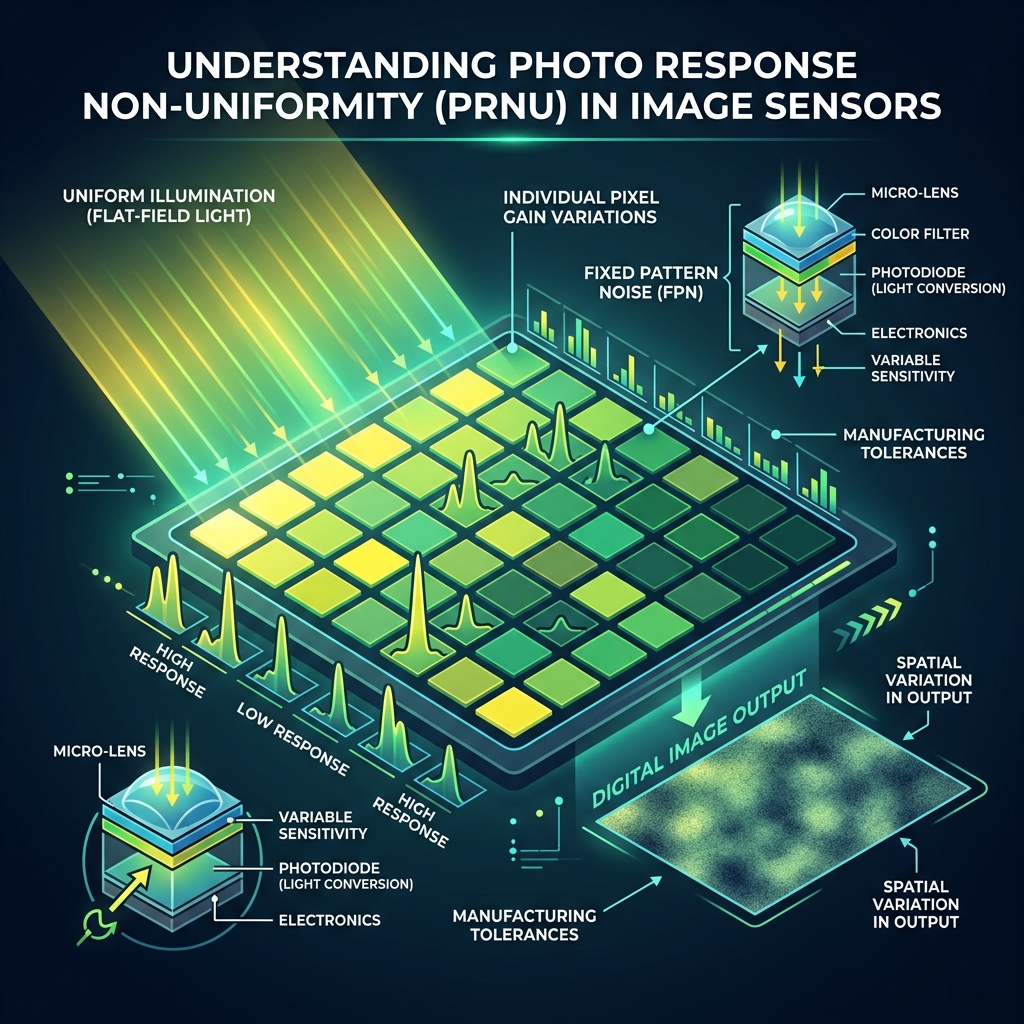
PRNU (Photo Response Non-Uniformity) 光照响应不均匀性 平场一致性
PRNU (%) ≈ σ_spatial_flat / Mean_flat × 100%
Corrected_Pixel(x,y) = (Pixel(x,y) - Dark(x,y)) / max(Flat(x,y) - Dark(x,y), ε)
Corrected_Pixel(x,y) = (Pixel(x,y) - Dark(x,y)) / max(Flat(x,y) - Dark(x,y), ε)
物理含义:
在均匀照明和平场条件下,像素间量子效率、微透镜、增益链路和照明残余不均会共同表现为响应差异。
在均匀照明和平场条件下,像素间量子效率、微透镜、增益链路和照明残余不均会共同表现为响应差异。
- 测试前提: 可靠 PRNU 需要均匀白板或可靠平场图,并尽量避免饱和、阴影、脏污和晶圆纹理进入统计。
- FFC 影响: 平场校正可以降低条纹和增益不均,但校正效果受平场质量、温漂、镜头像场和目标反射变化限制。
- 选型指导: PRNU 越低通常越利于降低背景伪结构;是否“足够好”应按具体缺陷尺寸、光学 NA、照明角度和算法阈值确定。
CNR (Contrast-to-Noise Ratio) 缺陷对比度噪声比 可分离度指标
CNR = |Mean_defect - Mean_background| / σ_background
(缺陷 ROI 与背景 ROI 的均值差,除以背景噪声或背景起伏)
(缺陷 ROI 与背景 ROI 的均值差,除以背景噪声或背景起伏)
物理含义:
CNR 衡量特定 ROI 中缺陷信号相对背景波动的可分离程度,适合比较同一缺陷、同一光学口径下的相机表现。
CNR 衡量特定 ROI 中缺陷信号相对背景波动的可分离程度,适合比较同一缺陷、同一光学口径下的相机表现。
- 检测本质: CNR 越高,缺陷与背景越容易被阈值或模型区分;但真实漏报、误报还受缺陷形态、纹理背景、算法策略和样本数量影响。
- 经验判定: CNR ≥ 3 常可作为高斯噪声近似下的较强可见性经验线,不代表 100% 召回;CNR < 1.5 通常说明缺陷容易被背景波动掩盖。
- 优化方向: 可通过降低 PRNU/DSNU 残差、改善照明方向和偏振、提高局部缺陷对比、控制饱和与背景纹理来提升 CNR。

Temporal SNR & Normalized Noise 时序信噪比与归一化噪声 重复采样噪声
Temporal SNR (dB) = 20 × log10(Mean / σ_temporal)
Shot-noise normalized ratio ≈ σ_temporal / √Mean
Engineering scale-to-1000DN = σ_raw × (1000 / Mean_raw)
Shot-noise normalized ratio ≈ σ_temporal / √Mean
Engineering scale-to-1000DN = σ_raw × (1000 / Mean_raw)
物理含义:
时序随机噪声应由同一像素、同一位置、同一照明下的多帧重复采样估计,可弱化静态纹理、PRNU 和 DSNU 对噪声估计的干扰。
时序随机噪声应由同一像素、同一位置、同一照明下的多帧重复采样估计,可弱化静态纹理、PRNU 和 DSNU 对噪声估计的干扰。
- 亮度依赖: 光子散粒噪声随信号近似按 √Mean 增长,所以 Temporal SNR 会随亮度升高而变好,直接比较不同曝光/亮度的 SNR 容易偏向更亮的一方。
- 归一化边界: σ_temporal / √Mean 只是在近似线性响应、同增益、散粒噪声占主导时弱化亮度影响;读噪、量化噪声、光源闪烁和运动配准误差仍会改变结果。
- 工程口径: 把 σ_raw 按 DN 比例缩放到 1000 DN 只能作为显示域启发式,不等同于真实曝光扫线或 photon transfer curve;正式选型建议补充等亮度实拍和动态线扫召回验证。
σ
时序采样、散粒噪声与亮度归一化边界
归一化指标用于辅助横评,不能替代等亮度、同增益、同光学条件的实测验证。
归一化指标用于辅助横评,不能替代等亮度、同增益、同光学条件的实测验证。